

2023-07-12
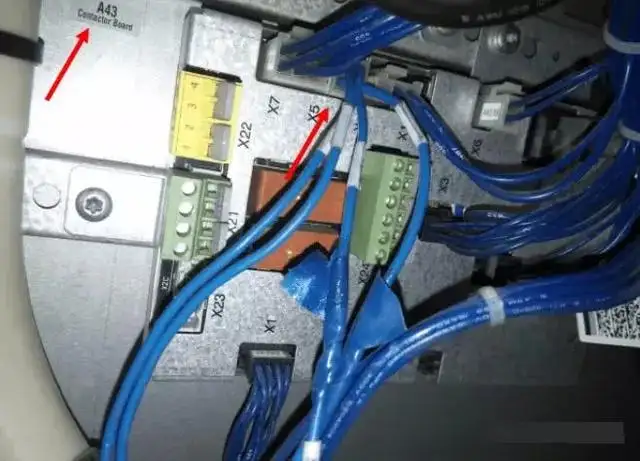
2. Manipulación de la falta del cortocircuito del tablero del cortocircuito del módulo de poder del robot de ABB
Factores humanos: El hardware del intercambio caliente es muy peligroso, y muchos fracasos de la placa de circuito son causados por el intercambio caliente. El uso de la fuerza incorrecto al insertar tarjetas y los enchufes con poder puede causar daño a los interfaces, microprocesadores, etc., llevando para dañar a la placa de circuito del robot; Pues la época de usar aumentos de los robots, los componentes en la placa de circuito del robot envejecerán naturalmente, llevando a los fracasos de la placa de circuito del robot.
Factores ambientales: Debido al mantenimiento incorrecto del operador, la placa de circuito del robot se cubre con el polvo, que puede causar cortocircuitos de la señal.
3. Cuándo es necesario a los robots industriales de reserva
Después del primer poder encendido de la nueva máquina.
Antes de hacer cualesquiera modificaciones.
3. Después de terminar las modificaciones.
4. Si los robots industriales son importantes, deben ser hechos una vez por semana sobre una base regular.
5. Es el mejor hacer una copia de seguridad en la unidad USB también.
6. suprima regularmente las viejas copias de seguridad para liberar para arriba el espacio del disco duro.
4. Cómo manejar la situación donde se gira el robot y el colgante de enseñanza guarda el exhibir del interfaz siguiente
 La situación antedicha es que no hay conexión de la comunicación establecida entre el colgante de enseñanza y el regulador principal del robot, y las razones de no establecer la conexión para incluir:
La situación antedicha es que no hay conexión de la comunicación establecida entre el colgante de enseñanza y el regulador principal del robot, y las razones de no establecer la conexión para incluir:
1. El anfitrión del robot es culpable.
2. La tarjeta incorporada de los CF (tarjeta del SD) del anfitrión del robot es culpable.
3. El cable de la red entre el colgante de enseñanza y el anfitrión es flojo, etc.
Método de proceso: 1. Compruebe si el anfitrión es normal y si la tarjeta del SD en el anfitrión es normal.
2. Compruebe si el cable de la red del colgante de enseñanza al anfitrión está conectado correctamente.
5. ¿Cuál es el significado del recordatorio del tiempo de mantenimiento 10106 cuando el robot exhibe un mensaje de alarma?
Esta situación es un recordatorio inteligente del mantenimiento periódico del robot de ABB.
6. ¿Cómo manejar un malfuncionamiento del sistema cuando el robot incorpora un estado del poder encendido?
1. Recomience el robot una vez.
Si no, control el colgante de enseñanza para avisos más detallados de la alarma y tomar medidas.
3. recomienzo.
4. Si todavía no puede ser lanzado, inicio del intento B.
5. Si todavía no trabaja, intente por favor el inicio de P.
6. Si todavía no trabaja, inténteme por favor inicio (esto volverá el robot a sus ajustes de la fábrica, tendrá cuidado).
7. ¿Se puede la copia de seguridad del robot compartir por los robots múltiples?
No. por ejemplo, la copia de seguridad del robot A se puede utilizar solamente para el robot A, no para el robot B o C, mientras que ésta puede causar fallos del sistema.
8. ¿Qué ficheros se pueden compartir en copia de seguridad del robot?
Si dos robots están del mismo modelo y configuración. Usted puede compartir el programa RÁPIDO y el fichero de EIO, pero después de compartir, también necesita ser verificada antes de que pueda ser utilizada normalmente.
9. ¿Cuál es el origen mecánico de robots? ¿Dónde está el origen mecánico?
Cada uno de los seis motores servos del robot tiene un origen mecánico fijo único. El ajuste incorrecto del origen mecánico del robot causará problemas tales como movimiento limitado o incorrecto del robot, de la incapacidad de caminar en una línea recta, y del daño grave al robot.
10. ¿Cómo despejar la alarma de la supervisión de la acción del robot 50204?
1. Modifique la acción del robot que supervisa parámetros (en el menú de la supervisión de la acción del panel de control) para hacer juego la situación real.
2. Utilice el comando de AccSet de reducir la aceleración del robot.
3. reduzca v en data_ de la velocidad la opción de la putrefacción.
11. ¿Cómo manejar la alarma “50296, diferencia de los datos de la memoria de SMB” cuando el robot se acciona encendido por primera vez?
1. Calibración selecta del menú principal de ABB.
2. haga clic en ROB_ 1. incorporan la pantalla de la calibración y la memoria selecta de SMB.
3. “avanzados selectos”, incorporan y hacen clic “memoria clara del gabinete de control”.
4. Después de terminar, haga clic “cercano” y después haga clic la “actualización”.
5. ‘gabinete de control intercambiado selecto o brazo robótico, poniendo al día el gabinete de control con datos de la memoria de SMB’.
12. ¿Cómo modificar la velocidad para requisitos particulares del movimiento de la trayectoria del robot en el programa RÁPIDO?
1. Datos selectos del programa del menú principal del colgante de enseñanza.
2. Después de encontrar el tipo de datos Speeddata, haga clic nuevo.
3. haga clic en el valor inicial, y los significados de las cuatro variables Speeddata son: el v_ TCP representa la velocidad corriente linear del robot, putrefacción del v_ representa la velocidad rotatoria del robot, v_ Leax representa la velocidad de funcionamiento linear del eje externo, v_ Reax representa la velocidad rotatoria del eje externo. Si no hay eje externo, los dos pasados no necesitan ser modificados.
4. Los datos modificados para requisitos particulares se pueden llamar en el programa RÁPIDO.
13. Localización de averías de 6 faltas comunes en la reparación del motor servo del robot de ABB
1. ¿Cómo manejar el error de desbordamiento del contador de error del motor durante la rotación de alta velocidad?
La falta del desbordamiento del contador de error del motor ocurre durante la rotación de alta velocidad.
Contramedidas 1: Compruebe si el cableado del cable de transmisión del motor y del cable del codificador está correcto y si se daña el cable.
La falta del desbordamiento del contador de error del motor ocurre al entrar un pulso largo del comando.
La falta del desbordamiento del contador de error del motor ocurrió durante la operación.
Contramedidas 2: Aumente el valor de determinación del nivel del desbordamiento del contador de error; Retrase la velocidad de rotación; Prolongue el tiempo de la aceleración y de desaceleración; La carga es demasiado pesada, y es necesario seleccionar un motor de una capacidad más grande a partir de cero o reducir la carga, e instala organizaciones de la transmisión tales como reductores para aumentar la carga.
2. ¿Qué debe ser hecha si no trabaja cuando hay salida de pulso?
Supervise el valor actual de la salida de pulso del regulador y si está destellando la luz de la salida de pulso, reconozca que el pulso del comando se ha satisfecho y ahora está haciendo salir normalmente;
Compruebe si el cable de control, el cable de transmisión, y el cable del codificador del regulador al conductor se atan con alambre incorrectamente, dañado, o en contacto pobre;
Compruebe si el freno del motor servo con el freno ahora se ha abierto;
Supervise si el panel del conductor servo reconoce la entrada de los comandos del pulso;
El comando funcionado con de la operación es normal;
La forma del control debe elegir la forma del control direccional;
Es el tipo del pulso de entrada fijado por el conductor servo constante con el ajuste del pulso del comando;
Asegúrese de que el lado positivo que se para la impulsión, la señal de la rotación de parada de la impulsión del lado de la rotación, y la señal de reset contrario de error no esté entrada, se desconecta la carga, y la operación sin carga es normal. Compruebe el sistema mecánico.
3. ¿Qué debo hacer si no hay informe de la sobrecarga con la carga?
Si ocurre cuando la señal funcionada con serva está conectada y no se emite ningún pulso:
Compruebe el cableado del cable de transmisión del motor servo para ver si hay algún daño pobre del contacto o del cable; Si es un motor servo con un freno, el freno se debe girar; Es el aumento del lazo de la velocidad fijó demasiado alto; Es el constante de tiempo integral del lazo de la velocidad fijó demasiado pequeño.
Si los únicos malfuncionamientos servos durante la operación:
Es el aumento del circuito del acimut fijó demasiado alto; Es la amplitud de colocar la realización fijó demasiado pequeño; Compruebe si no hay rotor bloqueado en el eje del motor servo y ajuste la maquinaria a partir de cero.
4. ¿Cómo ocuparse de los sonidos o de las vibraciones anormales durante la operación?
Cableado servo:
Utilice los cables de transmisión estandardizados, los cables del codificador, los cables de control, y los cables para comprobar para saber si hay daño; Compruebe si hay fuentes de interferencia cerca de la línea de control, y si están paralelos o demasiado cercanos a los cables de transmisión de gran intensidad próximos; Compruebe si hay algún cambio en el potencial del terminal que pone a tierra para asegurar poner a tierra excelente.
Parámetros servos:
El ajuste servo del aumento es demasiado grande, y se recomienda ajusta a manualmente o activamente los parámetros servos a partir de cero; Reconociendo el ajuste del constante de tiempo del filtro de la respuesta de la velocidad, con un valor inicial de 0, es posible aumentar el valor determinado en la prueba; El ajuste electrónico del ratio del engranaje es demasiado grande, abogando para restaurar a los ajustes de la fábrica; Resonancia entre el sistema servo y el sistema mecánico, probando y ajustando frecuencia y amplitud del filtro de muesca.
Sistema mecánico:
El acoplamiento que conectaba el eje del motor y el sistema del equipo se desvió, y los tornillos de la instalación no fueron apretados; El compromiso pobre de poleas o de engranajes puede también llevar a los cambios en el esfuerzo de torsión de la carga. Operación sin carga de la prueba. Si está sin carga la operación es normal, control si hay alguna anormalidad en la parte de enlace del sistema mecánico; Admita si la inercia, el esfuerzo de torsión, y la velocidad de la carga son demasiado grande, prueba la operación sin carga, y si la operación sin carga es normal, reduzca la carga o substituya el conductor y el motor por una capacidad más grande.
5. ¿Cómo dirigir el control inexacto de la orientación y la colocación durante la reparación del motor servo del robot de ABB?
En primer lugar, reconozca si el valor declarado real del pulso del regulador es constante con el valor previsto, y si no, compruebe y corrija el programa;
Supervise si el número de comandos del pulso recibidos por el conductor servo hace juego el que está anunciado por el regulador. Si no, control el cable de control; Compruebe si el ajuste de la forma serva del pulso del comando es constante con el ajuste del regulador, tal como CW/CCW o pulse+direction;
El ajuste servo del aumento es demasiado grande, por favor ajusta manualmente o activamente el aumento servo a partir de cero; El motor servo es errores acumulados propensos durante el movimiento de intercambio. Se recomienda para fijar una señal mecánica del origen bajo condiciones permitidas por el proceso, y realiza la operación de búsqueda del origen antes de que el error exceda la escala permitida; El sistema mecánico sí mismo tiene exactitud baja u organización anormal de la transmisión (tal como desviación del acoplamiento entre el motor servo y el sistema del equipo).
6. la reparación del motor servo del robot de ABB, operación de control direccional, falta de la velocidad excesiva divulgó. ¿Cómo dirigirla?
Tan pronto como la señal funcionada con serva esté conectada, accionará: compruebe si el cableado del cable de transmisión del motor servo y del cable del codificador es correcto e indemne.
14. ¿Cómo hacen los robots industriales de ABB experimentan mantenimiento general?
Antes de la operación normal de la “inspección del freno”, es necesario comprobar el freno del motor de cada eje. El método de la inspección para el freno del motor es como sigue:
1. funcionamiento el eje de cada brazo robótico a su posición de la carga máxima.
2. vuelta el encender de selección de modo del motor el regulador del robot a la posición de reposo de los MOTORES.
3. Compruebe si el eje está en su posición original. Si el brazo mecánico todavía mantiene su posición después de que se pare el motor, indica que el freno está en buenas condiciones.
Peligro de la función de la operación de la desaceleración que pierde (250mm/s)
No cambie el ratio del engranaje u otros parámetros del movimiento del ordenador o del colgante de enseñanza. Esto afectará a la función de la operación de la desaceleración (250mm/s).
15. Varios puntos para prestar la atención a al usar ayudas a la ense6anza con seguridad:
El botón de permisión del dispositivo instalado en el colgante de enseñanza, cuando está presionado a medio camino, cambia el sistema a los MOTORES EN modo. Cuando se lanza o se presiona completamente el botón, los cambios de sistema a los MOTORES del modo.
16. Para utilizar ayudas a la ense6anza con seguridad, los principios siguientes deben ser seguidos:
1.When el botón de permisión del dispositivo no puede perder su función durante la programación o la eliminación de errores, y el robot no necesita moverse, lanzar inmediatamente el botón de permisión del dispositivo.
2. Cuando los personales programados entran en un área segura, deben llevar siempre el colgante de enseñanza en su cuerpo para evitar que otros muevan el robot.
17. Al trabajar dentro de la gama de trabajo del brazo robótico, los puntos siguientes deben ser observados:
1. El interruptor de la selección de modo el regulador se debe girar a la posición manual para actuar el dispositivo de permisión para desconectar el ordenador o para actuar remotamente;
2. Cuando el interruptor de la selección de modo está prendido
3. atención de la paga al eje de rotación del brazo robótico, tener cuidado cuando el pelo o la ropa consigue mezclada para arriba. También, atención de la paga a otros componentes seleccionados o equipo en el brazo robótico;
4. Compruebe el freno del motor de cada eje.
18. Desviación del tacto
Fenómeno 1: La posición tocada por los fingeres no coincide con la flecha del ratón.
Razón: Después de instalar el programa del conductor, el colgante de enseñanza no tocó verticalmente el centro de la posición de la diana durante la calibración.
Solución: Recalibre la posición.
Fenómeno 2: Algunas áreas tienen tacto exacto, mientras que otras tienen desviación en tacto.
Causa: Una gran cantidad de polvo o de escala acumula en las rayas acústicas de la reflexión alrededor de la pantalla táctil de la onda acústica superficial, que afecta a la transmisión de señales acústicas.
Solución: Limpie la pantalla táctil, prestando la especial atención a limpiar las rayas de la reflexión de la onda acústica por todos los lados de la pantalla táctil. Al limpiar, desconecte la fuente de alimentación de la tarjeta de control de la pantalla táctil.
19. Tacto pendiente de enseñanza ninguna respuesta
Fenómeno: Al tocar la pantalla, las flechas del ratón no se mueven y no hay cambio en la posición.
Razón: Hay muchas razones de este fenómeno, como sigue:
1. El polvo o la escala acumulada en las rayas acústicas de la reflexión alrededor de la pantalla táctil de la onda acústica superficial es muy seria, haciendo la pantalla táctil no poder trabajar;
2. malfuncionamiento de la pantalla táctil;
3. La tarjeta de control de la pantalla táctil ha funcionado incorrectamente;
4. La línea de señales de la pantalla táctil ha funcionado incorrectamente;
5. El puerto serie de los malfuncionamientos del anfitrión;
6. El sistema operativo del colgante de enseñanza ha funcionado incorrectamente;
7. error de la instalación del conductor de la pantalla táctil.
Solución: Observe el indicador luminoso de la señal de la pantalla táctil, que destella regularmente en circunstancias normales, aproximadamente una vez por segundo.
Al tocar la pantalla, el colgante de enseñanza va negro, que es un problema complejo. Si se fija el ahorro de la energía del contraluz, la pantalla negra es normal; Si la segunda palabra en el área de control de sistema se actúa accidentalmente, la pantalla también irá negra. Si se excluyen los primeros dos puntos, actualización al último firmware para el estudio.
Envíenos su investigación directamente

