

2023-07-12
 Nuestro programa de robot de ABB consiste en principalmente tres módulos del módulo:
Nuestro programa de robot de ABB consiste en principalmente tres módulos del módulo:
1. Admin
2. programa de acción específico de la máquina (lo llamamos el trabajo)
3. escriba RegPos (usado como marcador después de ejecutar una posición específica en el trabajo)
En la parte antedicha del programa, modificamos principalmente el módulo 2module, que incluye muchos trabajos, y cada trabajo es un programa específico que ejecuta el movimiento de posición del robot.
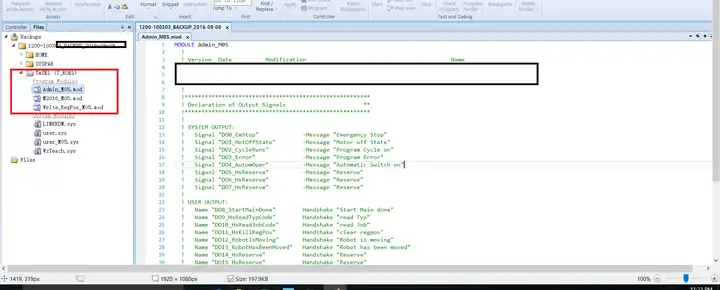
Cualquier programa tiene un punto de entrada de programa, y así que haga los programas de robot. Y la entrada a nuestro programa de robot está en el programa del Admin. El código fuente del programa del Admin principal () está como sigue. Por favor nota que hemos visto PROC principal (). La unidad de programación para los robots de ABB es el procedimiento, abreviado como PROC. El procedimiento principal para este programa del Admin está básicamente después de crear una nueva máquina:
PROC principal ()
CONECTE el fTCPSpeedHigh CON IGenRobotMoving;
CONECTE el fTCPSpeedLow CON IGenRobotMoving;
ISignalAO virt_TCPSpeed_Robot1, AIO_ABOVE_HIGH, 0,02, 0, 0, fTCPSpeedHigh;
ISignalAO virt_TCPSpeed_Robot1, AIO_BELOW_HIGH, 0,015, 0, 0, fTCPSpeedLow;
SI OpMode () =OP_MAN_PROG DE ENTONCES
TPErase;
¿TPReadFK FunkTaste, “trabajos selectos del movimiento por modo manual? ”, "", "", "", “no”, “sí”;
SI FunkTaste=5 ENTONCES
Manual;
TPErase;
TPWrite “robot que se mueve en modo manual”;
TPWrite “comunicación con el Amo-PLC”;
ENDIF
TypNum: =0;
JobNum: =0;
Funktaste: =0;
ENDIF
Inicialícese;
SpeedLimiter;
pStartingPoint: =CRobT (herramienta: =tool0 WObj: =wobj0);
regStartingAngleX: =EulerZYX (X, pStartingPoint.rot);
regStartingAngleY: =EulerZYX (Y, pStartingPoint.rot);
regStartingAngleZ: =EulerZYX (Z, pStartingPoint.rot);
regStoppedAngleX: =EulerZYX (X, pPointAtStop.rot);
regStoppedAngleY: =EulerZYX (Y, pPointAtStop.rot);
regStoppedAngleZ: =EulerZYX (Z, pPointAtStop.rot);
SI (pPointAtStop.trans.X>= (pStartingPoint.trans.X+regTransDiff) O
pPointAtStop.trans.X pPointAtStop.trans.Y>= (pStartingPoint.trans.Y+regTransDiff) O<>
pPointAtStop.trans.Y pPointAtStop.trans.Z>= (pStartingPoint.trans.Z+regTransDiff) O<>
pPointAtStop.trans.Z (regStoppedAngleX>=<>
(regStartingAngleX+regRotDiff) O
regStoppedAngleY>=<>
del regStoppedAngleX (regStartingAngleY+regRotDiff) O
regStoppedAngleZ>=<>
del regStoppedAngleY (regStartingAngleZ+regRotDiff) O
regStoppedAngleZ<>
pPointAtStop.robconfpStartingPoint.robconf ENTONCES<>
Fije DO13_RobotHasBeenMoved;
ENDIF
MIENTRAS QUE HACEN di8_HsStartMain=0
SetGO DO32_39_HsStepCode, 0;
WaitDI DI10_ReadJobCode, 1;
VelSet DI40_47_Override, 7500; ¡! La velocidad se fija a máximo
SetGO DO24_31_HsJobCode, DI24_31_JobCode;
SetDO DO10_HsReadJobCode, 1;
WaitDI DI10_ReadJobCode, 0;
SetDO DO10_HsReadJobCode, 0;
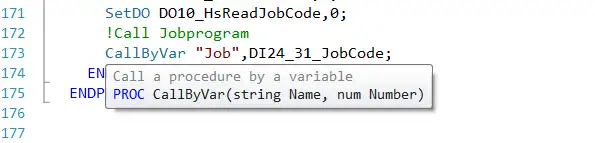
¡! Llamada Jobprogram
CallByVar “trabajo”, DI24_31_JobCode;
ENDWHILE
ENDPROC
Este programa es un pedazo de largo, y yo no quiere introducirlo demasiado. Quiero principalmente hablar de la sección pasada del programa, porque esta sección es la puesta en práctica de cómo el robot llama el programa del trabajo en el segundo módulo al mover su posición. Pienso que esto es también lo que quiere la mayoría de la gente que quiere aprender sobre programas de robot para conocer y para entender la mayoría:
En primer lugar, la primera frase MIENTRAS QUE HACEN di8_ HsStartMain=0
El apretón de manos ‘tubería de los medios de ‘DI8_HsStartMain’ de la nota que del comienzo hecha’
Esto significa que cuando la señal HsStartMain de Bool de la entrada digital es 0, significa que la tubería no se ha encendido todavía. Necesitamos ejecutar mientras que hacer para terminar todo el código. Hay muy algunos códigos aquí, y yo dará un ejemplo, tal como segundo
WaitDI DI10_ ReadJobCode, 1; El significado de la variable “DI10_ReadJobCode” de la anotación es el apretón de manos “trabajo leído” de la señal del apretón de manos del PLC.
¿Autorización, tan cómo hace exactamente que los robots ejecutan diversos trabajos? No se preocupe, es decir:
¡! La llamada Jobprogram es apenas un comentario
CallByVar “trabajo”, _JobCode de DI24_ 31; Esta frase es la esencia.
Envíenos su investigación directamente

