
Lugar de origen:
China
Nombre de la marca:
YOUNGYOU
Certificación:
CE
Número de modelo:
EW08-1
Contacto los E.E.U.U.
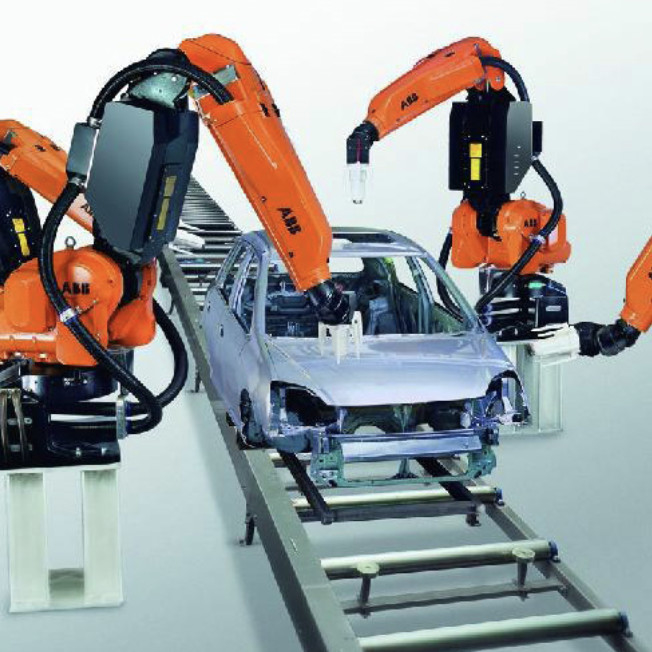


El software programado del robot de Kuka con la función de ajuste del proceso evita la pintura desigual
Nos centramos en diseño y el software de simulación visuales para el robot industrial que programa,
Después de casi 10 años de iteración de la innovación y de la versión del R&D y de actualizar, tiene varias tecnologías de base:
Incluyendo el motor uno mismo-desarrollado de la representación 3D, topología geométrica, algoritmo de solución característica-conducido, adaptante
posposición del robot de la Multi-marca, detección de colisión, simulación del código, etc.
El año pasado, nuestro software añadió la ayuda multilingüe tal como inglés, versiones chinas y rusas tradicionales para los ingenieros en todo el mundo
![]()
Proceso del uso del producto
1. Transfiera el modelo del robot de la biblioteca del recurso de la nube
2. Modifique el robot para requisitos particulares;
3. Importe el modelo. Construcción de la escena;
4. Generación de la pista;
5. Verificación de simulación;
6. Código de poste;
7. Operación del robot;
8. El robot termina el trabajo
![]()
![]()
Durante el uso del software, usted puede retroactuar los problemas que usted encuentra a nosotros con la función incorporada, y le daremos respuestas profesionales con whatsapp, correo electrónico, el etc.
![]()
![]()
Generación y el corregir de la pista
Hay nueve tipos de métodos de la generación de la pista, de centenares de parámetros de la pista y de docenas de métodos dados parámetros de la modificación de la pista.
Cálculo en tiempo real del espacio accesible
El software puede no sólo calcular el espacio accesible de la posición del reborde del robot, pero también el espacio accesible del efector final del robot, haciendo su diseño del puesto de trabajo y trayectoria que planean más realista y eficiente.
Programación externa de la herramienta
Hay dos modos de trabajo comunes de robots:
①Las herramientas de la mano, piezas fijaron; Piezas del PDA del ② y herramientas fijas;
El segundo se llama la herramienta externa, que es más compleja programar. El software proporciona las herramientas externas, las herramientas de la dislocación, el TCP continuo, el sistema coordinado del objeto, el etc. que se utilizarán junto, de modo que las piezas del PDA sean no más complejas.
detección de colisión
Durante la simulación, la función de detección de colisión se permite simular y detectar la colisión entre el robot y las piezas y las instalaciones circundantes cuando se está moviendo, y la incita destacando la línea y haciendo salir la información de la colisión.
Optimización de la pista
Puede reflejar la singularidad, el límite del eje, el inalcanzable, la colisión y la otra información en la pista en el interfaz, y evitar automáticamente la colisión arrastrando el ratón para obtener rápidamente la pista ideal y para mejorar eficacia del trabajo.
Acoplamiento externo del eje
Con la función de interpolación del acoplamiento externo del eje, los usuarios pueden optimizar la posición externa del eje para alcanzar el movimiento liso a lo largo de la trayectoria entera de la herramienta, sin manualmente la modificación de los puntos de control de la posición de blanco entre cada robot.
Envíenos su investigación directamente

