
Lugar de origen:
China
Nombre de la marca:
YOUNGYOU
Certificación:
CE
Número de modelo:
PY4030U-050
Contacto los E.E.U.U.
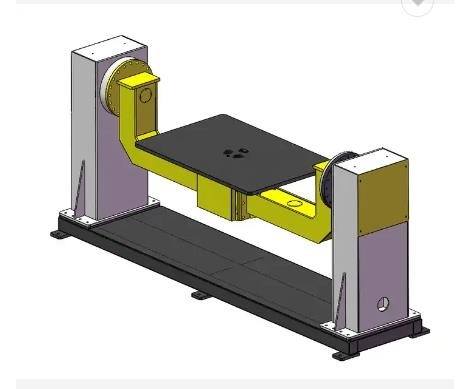




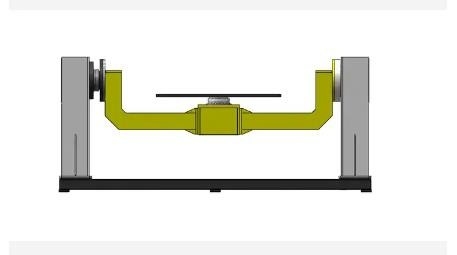
Hecho en posicionador de soldadura biaxial de la carga 100-1000kg de la placa giratoria 380v 50-60hz AXIS de China 1200*1200
Navegación del reflejo de luz y tecnología de la colocación para los robots móviles
La navegación típica del reflejo de luz que coloca método uso principal el laser o los sensores infrarrojos para extenderse. Laser e infrarrojo utilizar la tecnología del reflejo de luz para la navegación y colocar.
El sistema de navegación mundial del laser consiste en generalmente un mecanismo de rotación del laser, un reflector, un dispositivo de recepción optoelectrónico, y un dispositivo de adquisición de datos y de transmisión.
Durante la operación, el laser se emite hacia fuera a través de un mecanismo del espejo de rotación. Al explorar una señal cooperativa integrada por un reflector posterior, la luz reflejada es procesada por un receptor fotoeléctrico como señal de la detección. El programa de adquisición de datos se comienza para leer los datos del disco de código del mecanismo de rotación (el valor medido del ángulo de la blanco), y después se transmite al ordenador superior para la informática con la comunicación. De acuerdo con la posición sabida de la señal y de la información detectada, el cargo actual y la dirección del sensor en el sistema coordinado de la señal se pueden calcular para alcanzar la navegación y la colocación adicionales.
El alcance del laser tiene las ventajas del haz estrecho, buen paralelismo, pequeña dispersión, y de alta resolución en la dirección de alcance, pero también es afectado grandemente por factores ambientales. Por lo tanto, cómo al denoise la señal recogida al usar el alcance del laser es también un desafío importante. Además, el laser que se extiende también tiene puntos ciegos, haciéndola difícil alcanzar la navegación y colocándola solamente por el laser. En usos industriales, generalmente, es todavía ampliamente utilizado en la prueba in situ industrial dentro de una gama específica, tal como detección de las grietas de la tubería.
La tecnología de detección infrarroja es de uso frecuente en sistemas comunes multi de la evitación del obstáculo del robot formar una área extensa del robot “piel sensible” que cubre la superficie del brazo del robot y puede detectar los diversos objetos encontrados por el brazo del robot durante la operación.
Un sensor infrarrojo típico incluye un diodo electroluminoso de estado sólido que pueda emitir la luz infrarroja y un diodo fotosensible de estado sólido que sirva como receptor. La señal modulada es emitida por un tubo luminescente infrarrojo, y el tubo fotosensible infrarrojo recibe la señal modulada infrarroja reflejada por la blanco. La eliminación de interferencia infrarroja ambiental es asegurada por la modulación de la señal y un filtro infrarrojo dedicado. Si el Vo de la señal de salida representa la salida del voltaje de la intensidad de luz reflejada, después el Vo es una función de la distancia entre la punta de prueba y el objeto: Vo=f (x, p), donde está el coeficiente p de reflexión del objeto. P se relaciona con el color y la aspereza superficiales del objeto de la blanco. X - distancia entre la punta de prueba y el objeto.
Cuando el objeto es una blanco del mismo tipo con el mismo p-valor, x y el Vo corresponden uno por. X puede ser obtenido interpolando los datos experimentales de las medidas de la proximidad de los diversos objetos de la blanco. De esta manera, la distancia entre el robot y el objeto de la blanco se puede medir usando los sensores infrarrojos, y otros métodos de la tratamiento de la información se pueden también utilizar para navegar y para localizar el robot móvil.
Aunque la colocación de detección infrarroja también tenga ventajas tales como alta sensibilidad, estructura simple, y bajo costo, debido a su resolución del alto ángulo y a la resolución baja de la distancia, son de uso general como sensores de proximidad en robots móviles detectar el acercamiento o los obstáculos súbitos del movimiento, facilitando la detención de la emergencia de robots.
![]()
Sobre la compañía
Nuestro carril de guía ha cooperado con muchas marcas bien conocidas internacionales del robot, tales como ABB KUKA FANUC Yaskawa UR. Las compañías implicadas incluyen principalmente empaletar, la carga y la descarga. La carga de las gamas del carril de guía de 500kg a 5000kg. La longitud del carril de guía se modifica para requisitos particulares según las necesidades de clientes. Hemos hecho un caso que un robot de ABB IRB6700 corresponde a 20 máquinas del CNC, y un carril de guía los 50m largo termina el movimiento de intercambio, cargando y descargando del robot. El número de robots se reduce grandemente y se ahorra el coste de la integración.
Nuestra compañía también ofrece los robots industriales en los precios muy favorables para poner órdenes juntas en precios bajos.
¡Recepción a Shangai, China, investigar nuestros robots y carriles!
Fuente de producto de la compañía
Robot de ABB
Robot de KUKA
Robot de Yaskawa
Robot de Fanuc
Robot de UR
Cobot
Carril de guía
Cobot hizo en China
Especificaciones de producto
Tabla de parámetros del producto


Empaquetado y transporte
![]()
![]()
Envíenos su investigación directamente




